
Tilting Tri-Copter --> VTOL Flying Wing
This has been an ongoing development, with the final goal being a Tri-Copter that can transition from hovering flight to full forward flight, via tilting of the motors and avionics that can handle the stability control in all flight modes and transitions. I have worked through 4 phases of development so far, and have the final version flying.
   |
PHASE 1 consisted of initial testing with a tilting quad-copter. The quad-copter was made of BlueCor foam with carbon
fiber tubes for the main strength, and was done to see if transitioning was
possible. This airframe was very stable in hover, and could limp along
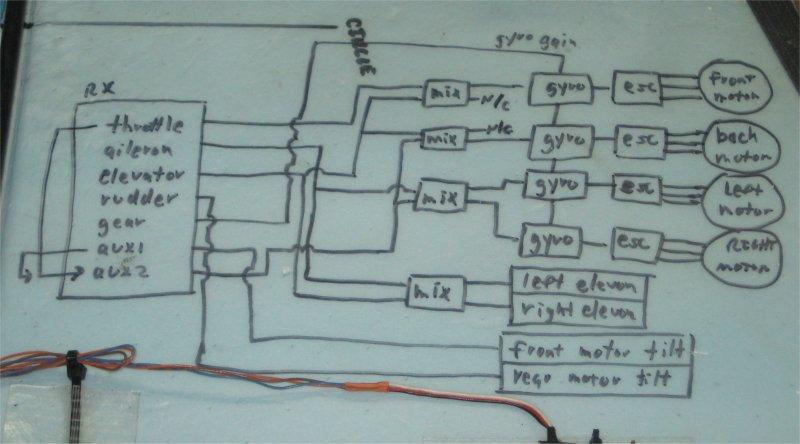
in forward flight. This setup had four HK 401B gyros, one for each
ESC. There was no separate control for forward flight - the gyro
gains were merely reduced to 0 for forward flight. A few
transitions were made, but they were ugly and did not end well. The wiring and mixing for this setup is shown in first photo to the left. |
||
  |
PHASE 2 consisted of a new fuselage made from EPP foam for the tilting tri-copter, and was flown with a HK KK 2.0 board with standard 1.6 software. Because of the way that power is routed on the KK 2.0 board, a split power setup was made to provide power from ESC #1 to the KK 2.0 board and receiver, and from ESC #2/#3 to the servos. Flight testing at various main engine tilting angles, up to about 20 deg forward tilt, showed this platform as stable and responsive to commands, and it flew very well in hover and slow forward flight. This video shows the PHASE 1 airframe in hover and slow forward flight.
|
||
  |
PHASE 3 consisted of the addition of a main wing
and canard, both made from blue foam. These blue foam additions were
connected to the EPP foam fuselage from phase 1. The blue foam wing and
canard were built very light, but I decided after putting it all
together that the EPP foam fuselage from phase 2 was too heavy. I went back to the drawing
board for a final wing design in phase 4, but I still kept the tilting mechanisms.
|
||
 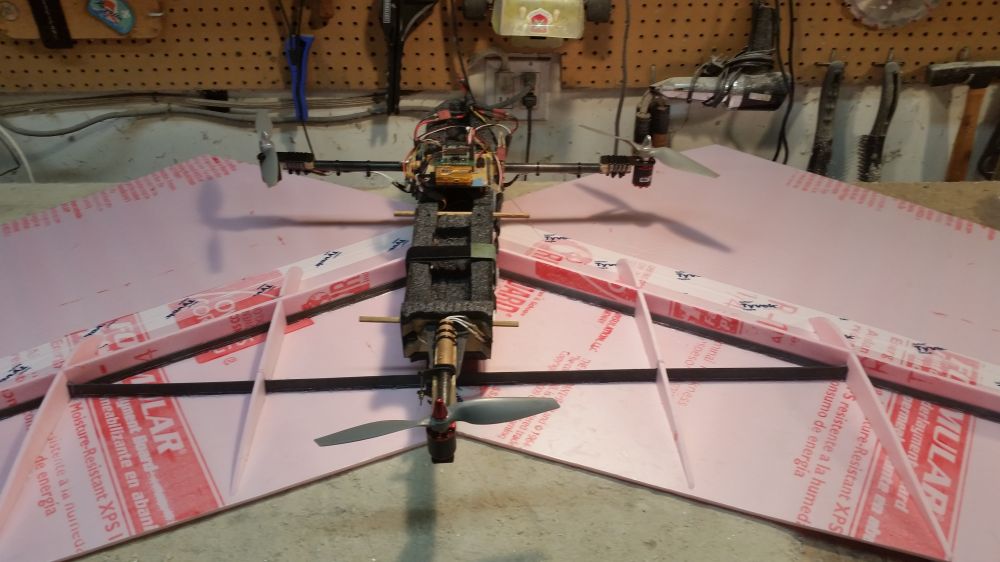  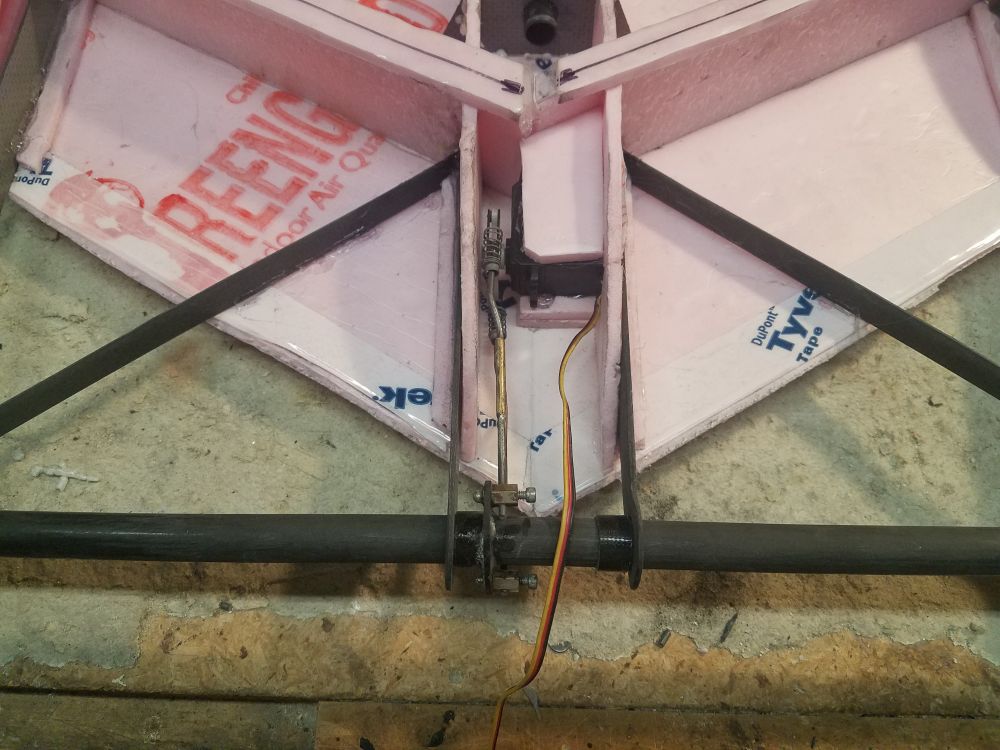    |
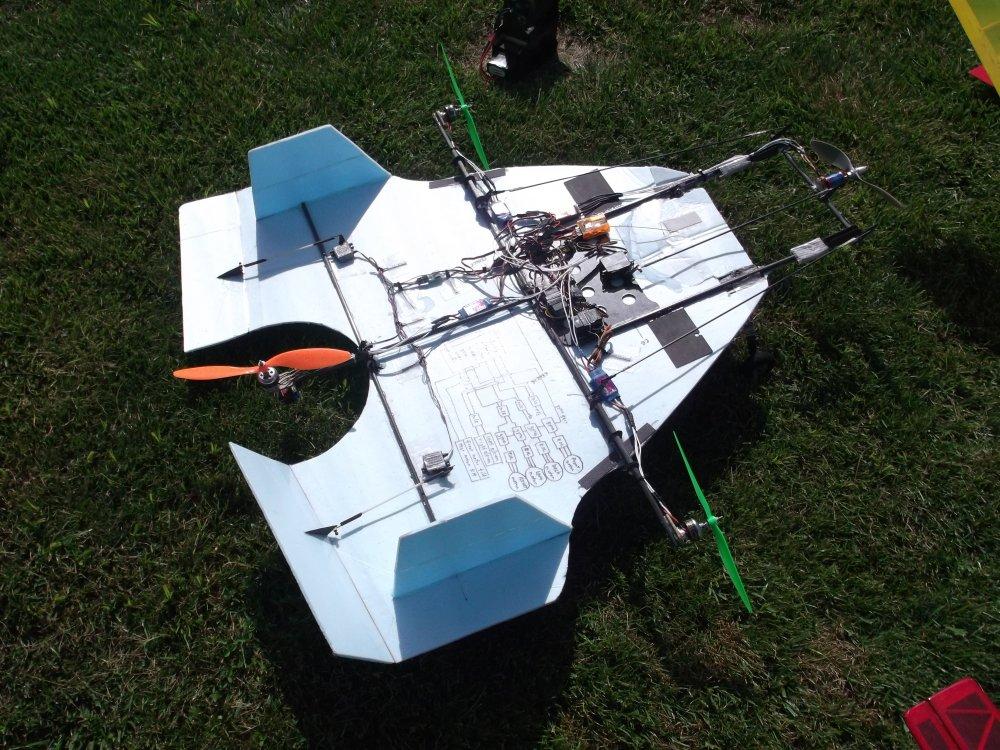
PHASE 4 consists of a 2 meter pink foam flying wing, using all the electronics from phase 2, but with everything built inside a light flying wing without the heavy EPP foam center fuselage. The tilting mechanism for the front motors and the electronics have been moved into this flying wing made of pink foam. This design is light enough for VTOL and forward flight. The photos on the left are all thumbnails. They show the phase 2 EPP fuselage sitting on the wing for a size comparison, the rear motor tilt mechanism for yaw, and the front motors tilt mechanism for transitioning from hovering to forward flight. Hover testing in this phase used a KK 2.1 flight controller with Steveis 1.19S software, set up in a tricopter configuration. The control loop runs at 400hz in this software. The speed controls use SimonK and BlHeli firmware. The first video below shows a hover test with this airframe. Forward flight testing in this phase used radio mixes only for the elevons, dual motors, and tilt servos. The next video below shows more hover testing and the initial forward flight testing. The hover and forward flight video was shot on the same day, after converting the controls at the flying field. The rear prop was removed for this, the first forward flight test. The third video below is from an on-board camera mounted on the top of the wing during later forward flight testing, and shows the motor tilt mechanism working during flight. The final phase of testing is the full transition from hovering to forward flight. This requires the use of the KK 2.1 flight controller board with special transitioning software. That transitioning software, OpenAero VTOL, and the full instructions on its use can be found here. The control loop in OpenAero VTOL runs at 200hz, so some gain adjustments are necessary with that software. The hover, forward flight, and transitional controls and mixing are in place on the flight controller. I am still tweaking the hover gains in this new software.
|


