


1. First step: RC equipment only, ailerons, flaps, elerudders with mixing done in the transmitter, nose steering, throttle via ESC.







{kind=link}


Electric UAV Shadow 2e
|
Electric UAV #1 used the foam wing from a Horizon Hobbies Cessna. The fuselage was built from scratch and the tail was an inverted V-tail on twin carbon fiber arrowshaft booms. |
|
The motor was a brushless 400, 6:1 gearbox, and 12x6 prop in a pusher configuration. It used a 10 amp brushless ESC and a large Thunder Power 3S4P lipo battery, 8000 mah total capacity. |
|
Several steps with various configurations of components were tried,
building up to everything together. 1. First step: RC equipment only, ailerons, flaps, elerudders with mixing done in the transmitter, nose steering, throttle via ESC. |
|
2. Next step addition: on-board video camera and 2.4 Ghz 600mw transmitter from BlackWidow. The CCD video camera was originally mounted on the nose, but was later moved under the fuselage with an adjustable viewing angle. You can see the homemade virtual ground plane antenna sticking out the rear of the fuselage. |
|
3. Next step addition: video overlay board from Sky Spy. The overlay board displayed altitude, airspeed, main battery voltage, vertical velocity, and RPM. You can see the overlay board contained within its electrically sealed bag. This had to be done to keep the RF output of the 2.4 Ghz video transmitter from interfering with the Sky Spy electronics. |
|
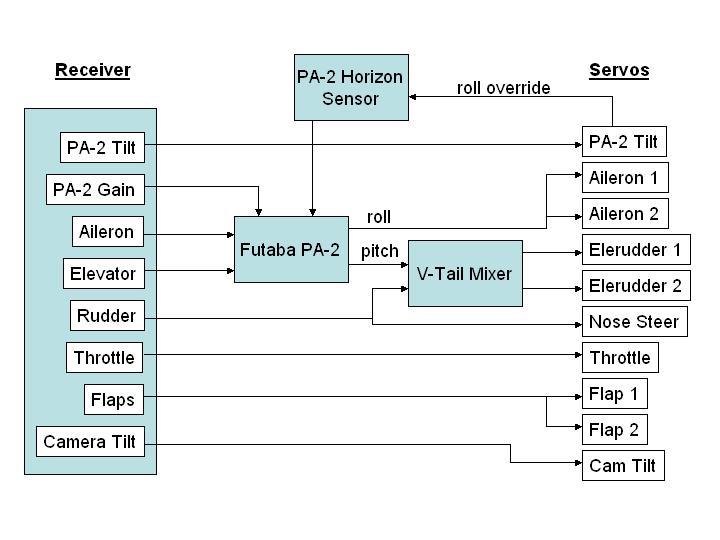
4. Last step addition: FMA Copilot and onboard elerudder mixing. The elerudder mixing had to be done onboard the air vehicle because the Copilot controlled roll and pitch, and the V-tail required mixed-in rudder, so the elerudder mixing could not be done on the ground. The last step in the integration process was to add the Copilot and onboard elerudder mixer. This mixing is similar, but not identical, to the setup I installed in my OS 61 powered Shadow 10, shown here. |
|
Ground tests with everything turned on showed intermittent control of the elerudder surfaces. It appeared that anything passing through the elerudder mixer was lost when the 2.4 Ghz transmitter was turned on. After adjusting the servo wires, the elerudder control was restored...I thought. All elerudder control was lost about 5 minutes into flight; again, only the elerudder control was lost. |
|
The airplane went in going straight down. It destroyed the airframe and ESC, damaged the Sky Spy video overlay board and FMA Copilot, and bent the main battery in half. The video transmitter and CCD camera were undamaged. |
|
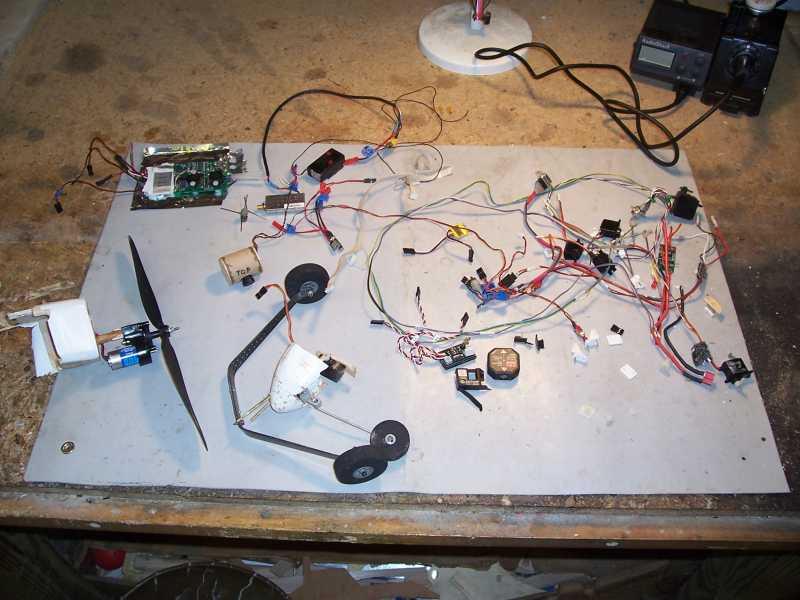
You can see here all the electronics laid out after removing them from the fuselage wreckage. They will be reborn. The Sky Spy overlay board and FMA Copilot were repaired. |
|
Ground control is done from commercial radio tray with a custom-made plexiglass cross-tray added . The radio tray holds the JR 10x transmitter in the regular position, and the plexiglass tray holds a LCD television on the left, and 2.4 Ghz patch antenna and video receiver (under the antenna) on the right. The configuration works great as a self contained unit. |
|
The new electric UAV #2 uses an almost identical airframe configuration to the original plane, except the new tail is a regular non-mixed elevator/rudder tail. It has been test flown and flies easily at 1/3 throttle. A new 3S4P lipo battery was acquired. Current draw at full throttle is less than 10 amps. With cruise easily at half throttle, the endurance with this 8000 mah battery should be approximately 1.25 hours. This endurance has not been tested yet. |
|
The wing is homemade, identical to the wing I use on my camera airplane. There are no ailerons and no flaps. |
|
On-board control is done with a digital elevator servo, digital rudder servo, standard nose steering servo, and throttle through a new ESC. The same brushless 400 motor, 6:1 gearbox, and pusher propellor are used. |
|
The battery sits in the front compartment and all the electronics go behind it under the wing. |