{kind=link}





Tricopters with HK 401B Gyros
Pretty much every tricopter is unique, but all are similar to the build threads at RCGRoups. The main thread at RCGroups is here: http://www.rcgroups.com/forums/showpost.php?p=14976864&postcount=58 Tricopters use 120 deg CCPM mixing, with brushless ESC's taking the place of the servos that normally drive the cyclic/collective swash plate. Both of my original tricopters used the same gyros and radio set-ups, with slightly different gains.
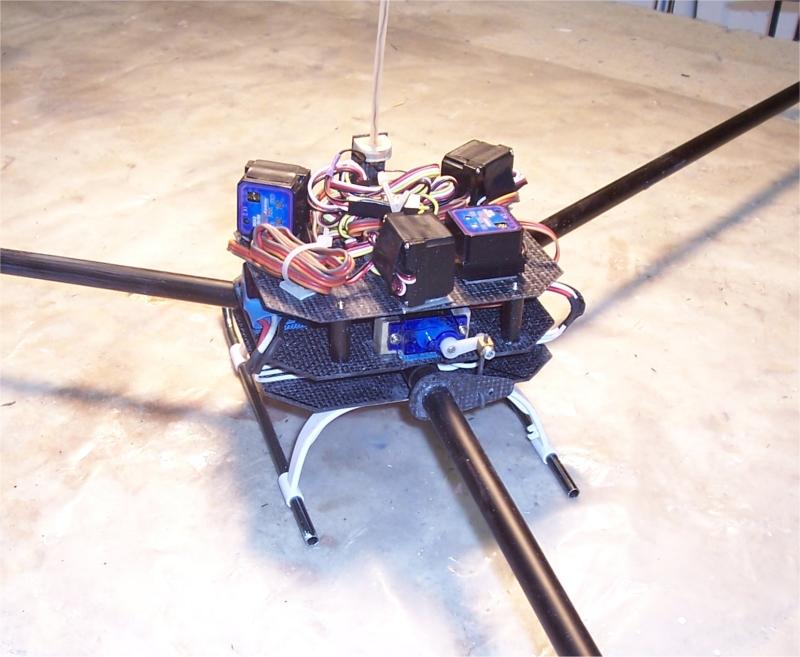
Small TriCopter: I originally built this as a quadcopter, but converted it to 3 motors. This flew well and had a stable hover. It had fixed carbon fiber booms and helicopter landing gear. (3x) 2410-09 outrunners and 18 amp ESCs, transmitter CCPM mixing, six channels, 4x HK 401B gyros. I upgraded this from the wood center section and thin carbon fiber booms to an all carbon fiber center section, thicker booms, and I moved the yaw servo to the center, where it rotated the entire rear boom. This was a much cleaner design, lighter, and stronger. The slightly different boom lengths required the gain on the three primary gyros to be reduced from 35% to 30%. Both versions FLOWN
|
|
|
|
|
|
|
|
|
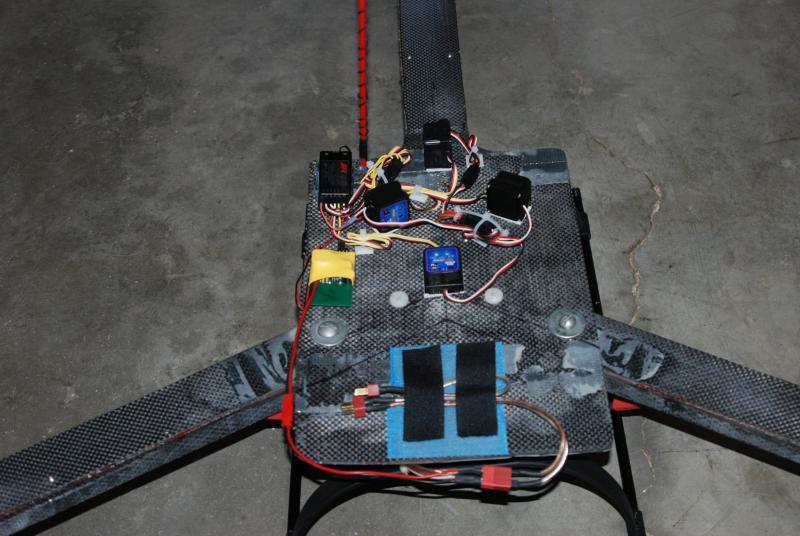
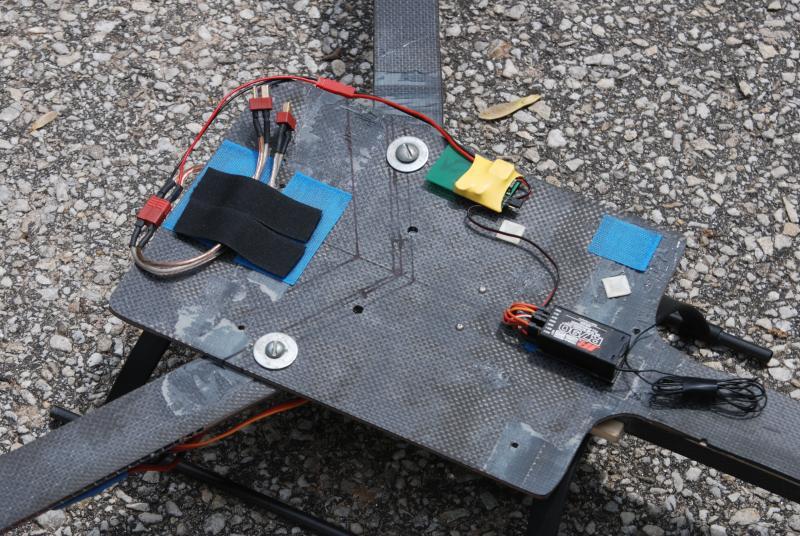
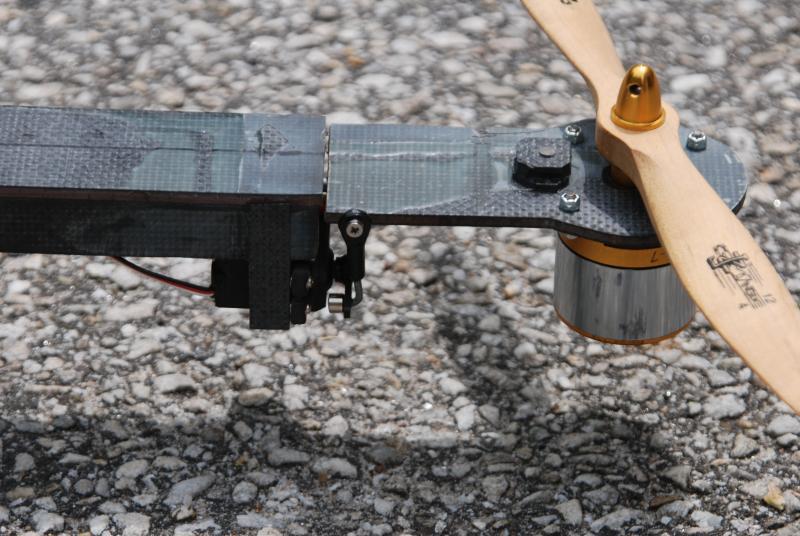
Big TriCopter: Folding carbon fiber frame and helicopter landing gear. This flies well also, but was kind of scary in a close hover because of the large motors and props. (3x) TowerPro 3520 outrunners and 50 amp ESCs, transmitter CCPM mixing, six channels, 4x HK 401B gyros. FLOWN
 |
 |
 |
 |
 |
JR 7202 Radio settings: Helicopter, 120 deg CCPM
| Channel 1 (throttle) | --> splitter to gyro #1, #2, #3 gain | ||
| Channel 2 (aileron) | --> gyro #1 | --> gyro #1 output | --> right front motor ESC |
| Channel 3 (elevator) | --> gyro #2 | --> gyro #2 output | --> rear motor ESC |
| Channel 4 (rudder) | --> yaw gyro | --> yaw gyro output | --> rudder servo (tilts motor) |
| Channel 5 (gear) | --> yaw gyro gain | ||
| Channel 6 (aux1) | --> gyro #3 | --> gyro #3 output | --> left front motor ESC |
Dual Rates: Aileron Exp 40% Elevator Exp 40% Rudder Linear / Swash Mix: Aileron 30% Elevator 30% Pitch 100% Exp inhibit / Throttle hold inhibit
Pitch Curve: Since I have the pitch portion of swash mix set at
100%, the pitch curve is actually controlling the throttle curve of the
ESCs. I have the 5 points set the same; to look like a exponential curve for all
three pitch curves. This is the same as the throttle curve and this
keeps the same response no matter how the mix switch is set. The bottom
and top ends
of the throttle PWM does not do anything in the ESCs, so I backed off
the top end of the curve to 90%, and raised the bottom end to 15% so I could get a little more fine
control.
Low: 15% / Point 1: 22% /
Point 2: 32% / Point 3: 52% /
High: 90%
Gear ATV: +50%, - 50%; This controls the gain on the yaw gyro.
Having it set like this allows the yaw gyro to be switched between 50%
gain in rate mode, and 50% gain in heading hold mode. It is up to you
which mode the gyro will operate in by flipping the gear switch.
The movement of the servo driving the left/right tilt of the rear motor is not
fast enough to cause the yaw of the Tricopter to hunt back and forth like it
would on a helicopter when the gain is too high, so 50% gain works as a good
all-around number for the yaw gyro.
Throttle Curve: this is setting the gyro gain for the three ESCs. You
want these gyros to be in rate mode. That means the signal needs to be
less than 50%. I finally settled on 35% gain in rate mode for the old
version of the small TriCopter, 30% gain in rate mode for the new version of the
small TriCopter, and 30% for the big TriCopter. 5%
more gain for each respective TriCopter caused them to 'ring' a bit in
the cyclic responses. Using the servo throw setup below for the HK
401 gyro, 35% gain rate mode =
50% - (.35 * 50%), or 32.5% total throw, and 30% gain rate mode = 50% -
(.30 * 50%), or 35% total throw. I have all three throttle curves (normal, 1,2) set as flat lines
at those total throws; this keeps the response the same no matter how I
have the flight mode switch set.
HK 401B ESC Gyros (#1. #2, #3): 0 delay, DS (digital servo) OFF, limit 100
HK 401B Yaw Gyro: 0 delay, DS OFF, limit 90
The gain and mode on the HK 401 gyro follows the same settings as used by the Futaba 410 gyro. 50% total throw = 0 gain in rate or heading hold. Above 50% = heading hold mode, below 50% = rate mode. Relative amount above 50% controls the gain of the gyro in heading hold mode. Relative amount below 50% controls the gain of the gyro in rate mode. Here is the manual for the HK 401B gyro.
Servo Throw (PWM) = mode, gain
: examples:
-- 100% (2.0 ms PWM) = heading hold, 100% gain
-- 90% (1.9 ms PWM) = heading hold, 80% gain
-- 80% (1.8 ms PWM) = heading hold, 60% gain
: if you want 60% gain in heading hold mode, you need 50% + (.6 *
50%) = 80% total throw.
-- 70% (1.7 ms PWM) = heading hold, 40% gain
-- 60% (1.6 ms PWM) = heading hold, 20% gain
-- 50% (1.5 ms PWM) = 0% gain
-- 40% (1.4 ms PWM) = rate mode, 20% gain
-- 30% (1.3 ms PWM) = rate mode, 40% gain
: if you want 40% gain in rate mode, you would need 50% - (.4 *
50%) = 30% total throw.
-- 20% (1.2 ms PWM) = rate mode, 60% gain
-- 10% (1.1 ms PWM) = rate mode, 80% gain
-- 0% (1.0 ms PWM) = rate mode, 100% gain
{kind=link}