We had to give back the Honeywell compass, which was merely a loaner. We are probably
going to end up using a Precision Navigation compass off of one of the other MIL projects.
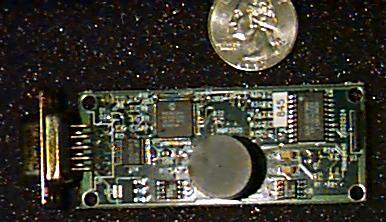
We are using a Honeywell HMR-3000 compass. This unit contains magnetometers on three axes
and tilt sensors on two axes, providing an electronically tilt-compensated output of
heading, along with pitch and roll. It works up to 45o tilt, and provides a
resolution of 0.1o and an accuracy of 0.5o
The HMR-3000 has a microprocessor on board, allowing it to perform data averaging and
filtering if needed. It has an ASCII RS-232 output format. We have configured the unit to
continuously transmit heading-pitch-roll information. The configuration is saved in
EEPROM, so the host computer only needs to send a start message, and then read the serial
information.
The HMR-3000 is about 3" x 1" x .75", and weighs 0.7 oz. It uses less than
25mA when active.
Back to Avigator
Revised 8/5/99