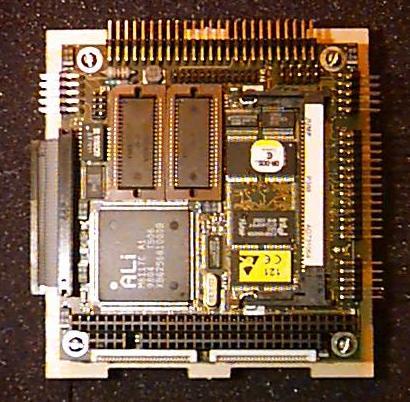


Avigator has two onboard computers. The primary computer is a JUMPTec MOPS LCD3. This
board provides essentially an entire desktop 386SX system on a 3.2"x3.6" board
(PC/104 format). This board has 6MB of RAM, and a 700KB Flash Disk. It is connected to a
3.2GB hard drive for additional storage. It is currently running under DOS 6.2, although
we also have had it running Linux 2.0.36.
A 386 was chosen to reduce cost and power consumption. A 486 board with similar features
would use 2-3 times the power of this board and cost 50% more. The 386 provides sufficient
processing power for the near future, since the neural network training can be performed
on the ground, on a faster computer. For now, the onboard computers only need to collect
data, and execute the trained neural network. When vision is added to Avigator in the
future, a more powerful processor may be needed.
In addition to running the neural network and storing data, the 386 computer interfaces
directly to the compass through an RS-232 serial connection.
The secondary computer is a Motorola 68HC11E2 on a Mekatronix MSCC11 board. This system
was chosen because it allows the use of existing code for the servo-control routines.
Several MIL robots use this board to control multiple servos. This board also interfaces
to all sensors other than the compass, which includes decoding the servo signals coming
from the receiver.
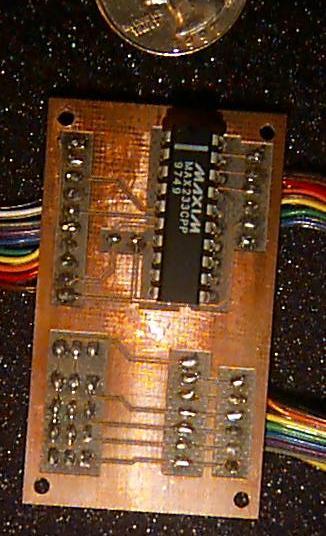
The two computer boards communicate via RS232 serial link. The MSCC11 has a TTL-level
serial output, which is converted to RS-232 by a board we built with the Maxim MAX233
transceiver chip. This chip is nice because it requires no external components. This
circuit is combined on the same board as the servo multiplexing circuit.
Back to Avigator
Revised 8/27/99